


عادة ما يتم استخدام هيكل أو صَدَفَة للروبوتات لتوفير بعض الحماية البيئية لها بالإضافة لتمكنها من التغلب على العقبات التي تعلق أمامها، لكن في الحقيقة تستخدم الحشرات هياكلها لأكثر من ذلك، وبإلهامٍ من واحدة من تلك الحشرات تمكن الباحث كوشك جايرم- Kaushik Jayaram من جامعة باركلي- UC Berkeley من تطوير روبوت يتمكن من تسطيح نفسه للانزلاق داخل أضيق الفتحات.
في ورقة نشرت في مجلة PNAS تناقش كيف كوّن الصرصور المزيج المثالي بين الصلابة من الخارج والليونة المطاطية من الداخل، فهيكلهم الخارجي مجزأ ومرن مما يتيح لهم الانضغاط للمرور من خلال الفتحات الصغيرة ولعل هذا هو سبب انتشارهم في المنازل، حتى في ظل قوى ضغط تعادل (300) من وزنها تستطيع هذه الحشرات التحرك، فطول هذه الحشرة في الطبيعي يساوي نصف إنش (1.27 سم) ولكنه قادر على المرور من خلال فتحات بطول (0.1) من الإنش إذا كان لديه الدافع القوي لذلك!
الشيء الرائع هنا ليس قدرة الصرصور على الانضغاط فقط؛ بل ومقدرته على التحرك في هذه الحالة، ولا يستطيع الصرصور أن يستخدم أقدامه بشكل جيد لأنها مفلطحة باتجاه الجنبين لذلك فإنه يستخدم أرجله بحركة تشبه السباحة، تؤدي هذه الحركة إلى بطئه النسبي فتقل سرعته من (60) سم/ثانية في الوضع الطبيعي إلى (15) سم/ثانية عند انضغاطه في فتحة بسمك (4) مم، ويشير الباحثون إلى هذا الأسلوب من الحركة باسم (الزحف باستخدام احتكاك الأرجل- body-friction legged crawling) حيث أن العوامل السائدة هي سحب الجسم ضد سقف وأرضية جنبًا إلى جنب مع الاحتكاك بين الساقين والطابق مما يؤدي إلى الدفع.
تعد هذه فكرة جيدة جدًا إذا كنت تُريد روبوتات يمكنها الزحف خلال فتحات ضيقة، لذلك قام جايرم بتطبيق هيكل مجزأ مرن على تصميم جامعة باركلي وخرج بهذا التصميم:
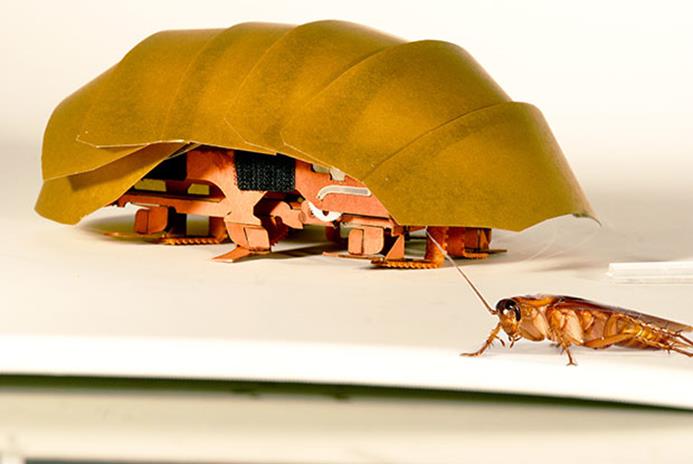
أُطلق على الروبوت اسم كارم- CRAM اختصارًا لـ compressible robot with articulated mechanisms
والتي تعني (روبوت باليات مفصلية قابل للانضغاط) والذي يمكنه الدخول لأماكن لا تستطيع الروبوتات الأخرى الوصول إليها.هذا ويبلغ طول الروبوت (18) سم وبارتفاع (75) مم ويزن (46) جرام. ويمكن للروبوت أن ينضغط لأكثر من (%50) من طوله ويصل لارتفاع (35) مم بالإضافة لقدرته على رفع وزن يساوي كيلو جرام واحد أي ما يعادل (20) ضغف كتلته، ومع كل هذه الميزات فهذا الهيكل يزيد كتلة الروبوت بـ(25%) فقط، ويمكنك رؤية الفرق بين الوضع الطبيعي للروبوت ووضع الانضغاط في هذه الصورة:

هذا ويستطيع الروبوت التحرك بسرعة (27) سم/ثانية (مسافة مرة ونصف طوله في الثانية) وتقل هذه السرعة إلى (14) سم/ثانية في حالة انضغاطه كليًا ويستخدم نفس تكنيك الحركة المستخدم للصرصور في حالة الانضغاط. وهذا يعطي الروبوت كمية كبيرة من التنوع في سياقات الإغاثة من الكوارث وما يشابهها، فنظرًا لرخص هذه الروبوتات فإن إلقاء الكثير منها للبحث في الأنقاض لا يسبب مشكلة فهي يمكنها الوصول بسرعة أكبر للأماكن الضيقة والمظلمة، وفي هذا الصدد يقول جايرم: «لكن للقيام بهذه المهمة يحتاج الروبوت للعديد من المستشعرات وهذه هي الخطوة القادمة»، فهم يخططون لجعل هذه الروبوتات أصغر وأسرع وأكثر قدرة على الانضغاط.
ويضيف: «بالإضافة للبحث والإنقاذ؛ فنحن نأمل أن روبوتات مثل كارم يمكن استخدامها في تطبيقات أخرى مثل البيئات المحدودة، والتحرك داخل الأنابيب هي إحدى التطبيقات المحتملة لذلك، وإذا ما تمكنا من تصغيرها بما فيه الكفاية؛ فيمكننا استخدامها في العمليات الجراحية ومساعدة الأطباء».
ترجمة: Ahmed Helmy
مراجعة: Matalgah Hamzeh
تصميم: Bothaina Mahmoud
المصدر: http://sc.egyres.com/DdWGb
#الباحثون_المصريون
