

إن نظام التحكم في جيل الروبوتات الحالي يعتمد على عدد من الحساسات التي تحدد بدقة خصائص سطح المسار الذي يسلكه الروبوت، فتصبح هذه الآلات وكأنها تملك أقدام مسطحة ضخمة تحافظ على توازنها أثناء الحركة، ولكن هذه التصميمات تقوّض بشكل مطلق من حرية الحركة التي يمكن الحصول عليها.
إن أقدام الروبوت مُسطّحة، ولا تتجاوب مع التغيرات في السطح كما تفعل القدم البشرية التي يمكن أن تقوم بآلاف التعديلات والحركات الدورانية للكاحل والقدم والأصابع للتلاؤم مع شكل الأرضية، بالإضافة لذلك فإن تصميم القدم المُسطحة يُصعّب توازن الآلة أو رفع أرجل الروبوت لتفادي العوائق.
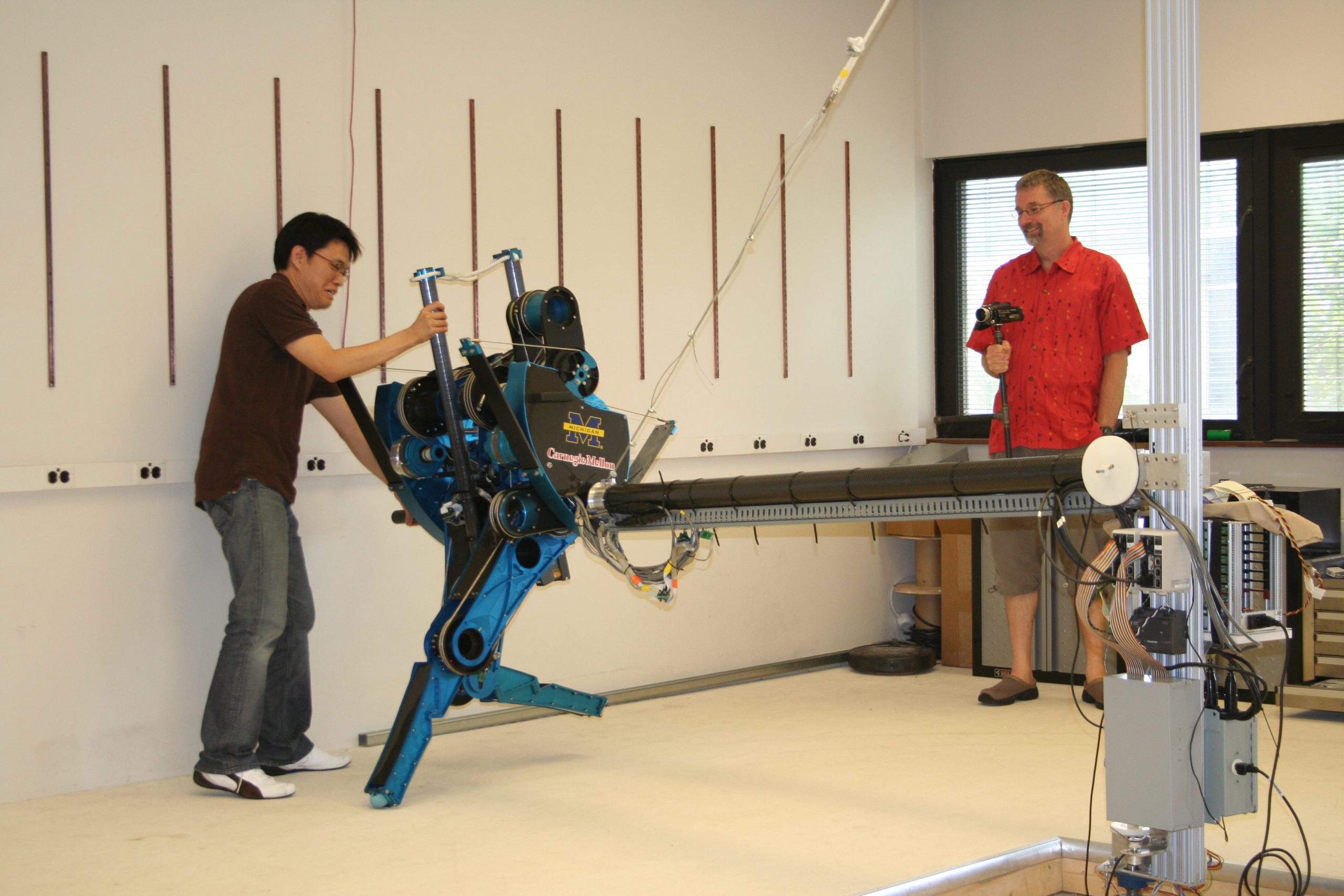
مابل (MABEL) هو روبوت جديد مُزدوج القدمين مُزوّد بذراع تدعيم جانبية، وعلى الرغم من أن هذه الذراع تمنعه من الحركة جانبياً، لكنها لا تعوقه من الانحناء إلى الأمام أثناء سيره. يكسر مابل قواعد الروبوتات، فهو يتحرك على أقدام نقطية غير متحركة ميكانيكياً بدلاً من المشي على أقدام مسطحة، بمعنى آخر: مابل لا يمتلك أقداماً بالمعنى التقليدي لهذه الكلمة إطلاقاً.
إن أقدام هذا الروبوت ليس بها أي محركات، ولا تحتوي أيضاً على أجزاء مفصلية إضافية تساعد على اتزانه كالكاحل أو الكعب أو الأصابع، ولكن عوضاً عن هذا فهو يمشي على عدد من الدعائم التي تشبه الركائز، بالاعتماد خوارزمية تحكم متقدمة تمكنه من المشي و الجري.
أظهرت الاختبارات أن مابل قادر على الجري بسرعة (6.8) ميلاً في الساعة، ليكون بذلك منافساً شرساً لأسرع العدائين، بالإضافة لقدرته على التوازن وعدم السقوط أثناء تخطي الحواجز.
صور لحركة الروبوت:
http://www.nsf.gov/news/mmg/media/images/IMG_6345.JPG
http://www.nsf.gov/news/mmg/media/images/mabel_with_shoes.gif
http://www.nsf.gov/news/mmg/media/images/walking_robot2.gif
ترجمة : إسلام درويش
مراجعة:Michel Bakni
المصدر: http://sc.egyres.com/delbN
#الباحثون_المصريون

{kind=link}
{kind=link}
{kind=link}