
؟")
نبذة عن نظام تحديد المواقع العالمي (Global Positioning System)
يُعتبر نظام تحديد المواقع العالميّ نظامًا ملاحيًّا مُرتكزًا على القمر الصّناعيّ، أُنشئ على يد قسم الدّفاع التّابع للولايات المتّحدة (U.S. Department of Defense) في فترة السّبعينيّات.[2]
في البداية، كان ذلك النّظام مُستخدمًا في الجيش الأمريكيّ لتلبية الاحتياجات الحربيّة، ثمّ تطوّر بعد ذلك وأصبح مُتاحًا لكلٍّ من الجيش والمستخدمين المدنيّين.[2]
يوفّر نظام تحديد المواقع العالميّ بشكلٍ مستمرٍّ المعلومات المكانيّة والزّمانيّة ﻷيّ مكانٍ بالعالم مهما كانت الظّروف الجوّيّة. ولأنّه يخدم عددًا غير محدودٍ من المستخدمين ويُستعمل في الأمور الأمنيّة، يستخدم نظام تحديد المواقع العالميّ نظام اتّصالاتٍ أحاديّ الاتّجاه (One-way-ranging) أو ما يوصف بنظام اتّصالاتٍ سلبيٍّ، حيث إنّ استقبال الإشارات من اﻷقمار الصّناعيّة هو كلّ ما يستطيعه المستخدمون.[2]
مكونات نظام تحديد المواقع العالمي
يتكوّن ذلك النّظام من كوكبةٍ من 24 قمرًا صناعيًّا، وللتّأكّد من تغطية العالم بذلك النّظام بشكلٍ مستمرٍّ، وُزّعت الأقمار الصّناعيّة على ستّة مداراتٍ بحيث يتأكّد وجود 4 إلى 10 أقمارٍ صناعيّةٍ مرئيّةٍ من أيّ مكانٍ بالعالم. ويكفي استخدام 4 أقمارٍ صناعيّةٍ فقط لتحديد الموضع والمكان والتّوقيت.[2]

شرائح نظام تحديد المواقع العالمي
يتكوّن نظام تحديد المواقع العالميّ من ثلاثة شرائحٍ، وهي: شريحة الفضاء، وشريحة التّحكّم، وشريحة المستخدم.[2]
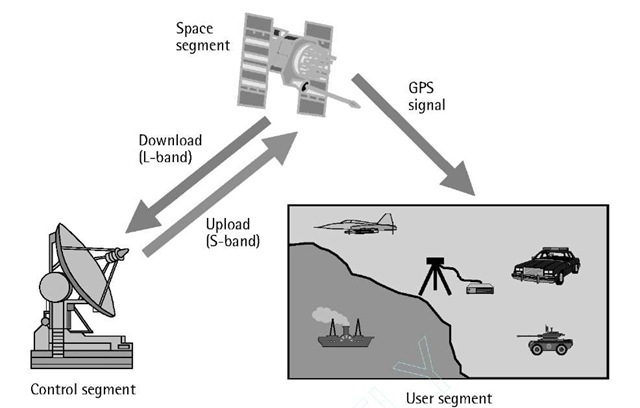
شريحة الفضاء
تتكوّن هذه الشّريحة من كوكبةٍ من 24 قمرًا صناعيًّا كما ذُكر سابقًا، حيث يقوم القمر الصّناعيّ بإرسال إشارةٍ مُكوّنةٍ من عدّة عناصر؛ وهي رسالةٌ ملاحيّةٌ، وكودان رقميّان، وموجتان جيبيّتان (Two sine waves) تسمّيان أيضًا بالتّردّدات الحاملة. حيث تُضاف الأكواد والرّسالة الملاحيّة على التّردّدين الحاملين عن طريق التّضمين ثنائيّ الطّور (Binary bi-phase modulation). تُستعمل تلك الأكواد والحاملات لقياس المسافة بين الأقمار الصّناعيّة وجهاز الاستقبال للمستخدم.[2]
شريحة التحكم
تتكوّن هذه الشّريحة من شبكةٍ عالميّةٍ من محطّات التّتبّع، وترأسهم محطّة التّحكّم الرّئيسيّ (MCS) الّتي تقع في مدينة كولورادو سبرينجز في ولاية كولورادو بالولايات المتّحدة. المهمّة الأساسيّة لشريحة التّحكّم هي تتبّع الأقمار الصّناعيّة لتحديد مواقعها والتّنبّؤ بها، بالإضافة إلى تحديد سلامة النّظام، والسّاعات الذّرّيّة للأقمار الصّناعيّة، والبيانات الجوّيّة، واعتباراتٍ أخرى.[2]
شريحة المستخدم
تشمل تلك الشّريحة الاستخدام الحربيّ والمدنيّ. فعندما تتّصل أجهزة الاستقبال مع أجهزة الاستشعار (Antenna) الخاصّة بنظام تحديد المواقع العالميّ، يستطيع المُستخدِم أن يستقبل الإشارات الّتي تساعده على تحديد موقعه.[2]
مفاهيم رئيسية في تحديد المواقع من الفضاء
يُمكن تحديد المواقع عبر الكثير من الطّرق والأدوات المختلفة. واعتمادًا على ما تحدَّد المواقع نسبةً له، يمكننا تعريف اﻷسلوب المتّبع في نظام تحديد المواقع. فمن الممكن استخدام نظام إحداثيّاتٍ -غالبًا ما يكون مُتمركزًا حول الأرض-، أو استخدام نقطةٍ أخرى، أو في حدود سياق عدّة نقاطٍ.[1]
أنواع تحديد المواقع
1. تحديد المواقع باستخدام نقطة
عندما نجد كلمة «تحديد المواقع»، أوّل شيءٍ يخطر ببالنا هو تحديد أماكن الأجسام الثّابتة أو المتحرّكة. فإذا كان الجسم في موضعٍ ثابتٍ، فذلك يُسمّى بـ «تحديد المواقع السّاكنة»، أمّا إذا كان الجسم متحرّكًا فذلك يُسمّى بـ «تحديد المواقع الكينماتيّة».[1]
توجد بعض الفروق بين هذين الوضعين في تحديد المواقع؛ على سبيل المثال، يُستخدم نظام «تحديد المواقع السّاكنة» في عمليّة مسح وفحص الأراضي (surveying)، بينما يُستخدم نظام «تحديد المواقع الكينماتيّة» في الملاحة.[1]
تحديد المواقع باستخدام نقطةٍ هو تحديد نقطةٍ نسبةً إلى نظام إحداثيّاتٍ معرّفٍ مسبقًا، يكون عادةً نظامًا ثلاثيّ الأبعاد.[1]

2. تحديد المواقع النسبي
يُعدّ نظام تحديد المواقع النّسبيّ أكثر بساطةً من نظام تحديد المواقع باستخدام نقطةٍ، خاصّةً عندما ترى كلّ نقطةٍ من الاثنتين اﻷخرى. وهنا تستخدم الأساليب الأرضيّة في تحديد المواقع. كما توجد الكثير من تقنيّات أنظمة تحديد المواقع النّسبيّة الّتي ترتكز على العديد من المفاهيم الهندسيّة والفيزيائيّة. وهي الوضع الأساسيّ الّذي يُستعمل في ممارسة مسحات الأرض.[1]
3. شبكة النقاط
هو نظامٌ مُكوّنٌ من عدّة نقاطٍ مُتّصلةٍ ببعضها (تُعرف بنقاط التّحكّم) حتّى تُشكّل شبكةً. وعادةً ما يُستعمل هذا النّظام مع النّقاط الثّابتة المتّصلة ببعضها بشكلٍ جيّدٍ؛ وهذا بسبب ضرورة تكرار المرور على النّقاط الفرديّة لهذه الشّبكة. وعندما توضع تلك النّقاط مع بعضها وتترابط بشكلٍ متكرّرٍ، يؤدّي هذا إلى تكوين إعدادٍ قويٍّ هندسيًّا.[1]

مناطق الثقة والأخطاء النسبية
من الضّروريّ تحديد صلاح المواضع (مثل دقّتها) عند التّطبيقات العمليّة، ومن ضمن أهمّ الوسائل في تحديد صلاحيّة المواضع هي «مناطق الثّقة». تكون هذه المناطق على شكلٍ بيضاويٍّ؛ سطحٍ ناقصٍ (ellipsoid) في حالة إن كانت على نظامٍ ثلاثيّ الأبعاد، أو قطعٍ ناقصٍ (ellipse) في حالة إن كانت على نظامٍ ثنائيّ الأبعاد.[1]
وهناك مفهومٌ أصبح مستخدمًا بكثرةٍ لوصف دقّة تحديد المواضع، وهو «تبدّد الدّقّة» (Dilution of Precision)، يُعدّ هذا المفهوم في الأساس مقياس جذر جمعٍ تربيعيٍّ (root-sum-squared) لحجم منطقة الثّقة المُحدّدة.[1]
دور نظام تحديد المواقع العالمي في مراقبة الجو
توجد طريقتان أساسيّتان لمراقبة خصائص الغلاف الجوّيّ للأرض.
الطريقة الأولى
هُنا تتمّ مراقبة الجوّ عن طريق تجميع البيانات التّابعة لأجهزة الاستقبال ذات التّردّد المزدوج والثّابتة في موضعها على الأرض. تتأخّر وتنكسر إشارات نظام تحديد المواقع العالميّ الّتي تصل من الأقمار الصّناعيّة إلى أجهزة الاستقبال المتواجدة على الأرض، بسبب الغازات وبخار الماء في الغلاف الجوّيّ. ويُعدّ هذا التّأخير واضحًا ومميّزًا؛ لأنّ بخار الماء هو المكوّن الجوّيّ الوحيد الّذي يمتلك عزم ثنائيّ أقطابٍ دائمًا، والّذي ينتج بسبب التّوزيع غير المتماثل للشّحنة الكهربيّة في جزيء بخار الماء، ممّا يؤدّي إلى تعطيل انتشار الأشعّة الكهرومغناطيسيّة عبر الجوّ. ولذلك أصبح تأخير انتشار أشعّة الميكروويف (microwave) إلى الأرض بسبب بخار الماء يُدعى بـ «التّأخير الرّطب»، فهو في علاقةٍ نسبيّةٍ مع كمّيّة أبخرة الماء في مسار الإشارة المُرسَلة.[3]
الطريقة الثانية
توجد طريقةٌ أخرى لمراقبة الجوّ نتجت عن مجهوداتٍ بُذلت لدراسة أجواء الكواكب الأخرى، وسُمّيت هذه الطّريقة بـ «الغمر الرّاديويّ» (Radio Occultation).[3]
الغمر الراديوي
مع الإطلاق الأخير لجهاز الاستقبال لنظام تحديد المواقع العالميّ (GPS) على أقمارٍ صناعيّةٍ للمدار الأرضيّ المنخفض (Low Earth Orbit Satellite)، بدأ تطبيق الغمر الرّاديويّ لدراسة الغلاف الجوّيّ للأرض وذلك بإرسال إشارات الرّاديو المُزدوجة إلى مركبةٍ فضائيّةٍ مُتواجدةٍ على جانبٍ بعيدٍ من جوانب الكوكب، فتتعرّض هذه الإشارات للانكسارات في طريقها عبر الغلاف الجوّيّ، فتتعرّف أجهزة الاستقبال على بيانات الضّغط الجوّيّ ودرجات الحرارة للكوكب بمعلوميّة العلاقة الخطّيّة بين كثافة الهواء ومقدار انكسار اﻷشعّة.[3]

تأتي هذه التّقنيّة نتيجة جهودٍ منذ أكثر من ثلاثين عامًا لدراسة اﻷغلفة الجوّيّة للكواكب اﻷخرى. وبها يكون من الممكن تحديد درجات الحرارة والضّغط الجوّيّ عن طريق حساب التّأخير والانكسار للإشارات، وعلاقتها بكثافة الغازات.[3]
| الدور | الاسم |
|---|---|
| إعداد | يسرا الحداد |
